An artificial remote tactile device with 3D depth-of-field sensation
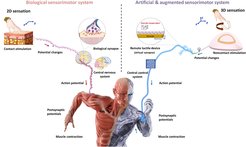
Sensorimotor augmentation: a stretchable remote tactile device with 3D depth-of-perception equips a biological model with the sense of electroreception.
Flexible tactile neuromorphic devices are becoming important as the impetus for the development of human-machine collaboration. However, accomplishing and further transcending human intelligence with artificial intelligence still confront many barriers. Here, we present a self-powered stretchable three-dimensional remote tactile device (3D-RTD) that performs the depth-of-field (DOF) sensation of external mechanical motions through a conductive-dielectric heterogeneous structure. The device can build a logic relationship precisely between DOF motions of an external active object and sensory potential signals of bipolar sign, frequency, amplitude, etc. The sensory mechanism is revealed on the basis of the electrostatic theory and multiphysics modeling, and the performance is verified via an artificial-biological hybrid system with micro/macroscale interaction. The feasibility of the 3D-RTD as an obstacle-avoidance patch for the blind is systematically demonstrated with a rat. This work paves the way for multimodal neuromorphic device that transcends the function of a biological one toward a new modality for brain-like intelligence.